
Building a Gimbal in Rust: A Comprehensive Guide

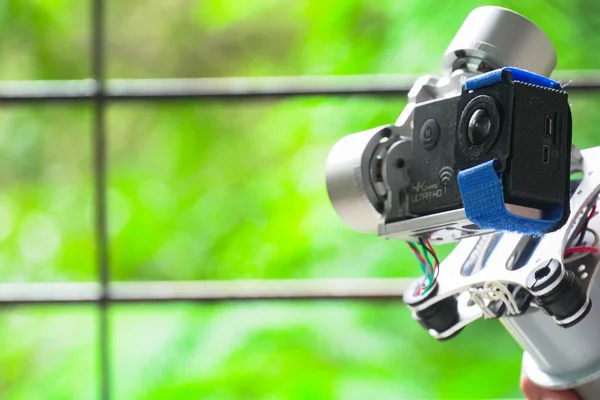
A gimbal is a device that allows an object to rotate freely in one or more axes. They are commonly used in cameras, satellites, and other applications where stability is crucial.
Rust is an excellent language for building embedded systems and low-level applications, making it well-suited for gimbal development. Its strong safety guarantees, performance characteristics, and growing ecosystem of libraries make it a compelling choice.
Key Components and Considerations:
-
Hardware:
- Motors: Servo motors or brushless DC motors are commonly used.
- Microcontroller: Choose a microcontroller with sufficient processing power and I/O pins.
- Sensors: Accelerometers, gyroscopes, and magnetometers provide data for stabilization.
- Power Supply: Ensure a stable and reliable power source.
-
Software:
- Firmware: Write the firmware in Rust to control the microcontroller, communicate with sensors, and drive the motors.
- Algorithm: Implement a control algorithm (e.g., complementary filter, Kalman filter) to fuse sensor data and stabilize the gimbal.
- Communication: If necessary, implement communication protocols (e.g., UART, I2C, SPI) to interface with external devices.
-
Libraries and Frameworks:
- Embedded Rust: Leverage the embedded Rust ecosystem for hardware abstraction and device drivers.
- Sensor Libraries: Use libraries for interacting with sensors (e.g.,
embedded-hal,i2c-hal). - Control Algorithms: Consider using existing libraries or implementing your own control algorithms.
Example Code Structure:
use embedded_hal::prelude::*;
use hal::prelude::*;
// … other imports
fn main() -> ! {
let dp = cortex_m::Peripherals::take().unwrap();
let cp = cortex_m::Peripherals::take().unwrap();
// … initialize hardware components
let mut sensor = Sensor::new(i2c, address);
let mut motor = Motor::new(pwm, pin);
loop {
// Read sensor data
let data = sensor.read();
// Calculate control signal
let control_signal = control_algorithm(data);
// Drive motor
motor.set_duty_cycle(control_signal);
}
}
Additional Tips:
- Start small: Begin with a simple setup and gradually add complexity.
- Debugging: Use debugging tools and techniques to identify and fix issues.
- Testing: Thoroughly test your gimbal to ensure it performs as expected.
- Optimization: If necessary, optimize the code for performance and power consumption.










{kind=link}
{kind=link}